诸怀疆 | Huaijiang Zhu

I am a PhD student at the New York University Tandon School of Engineering, advised by Prof. Ludovic Righetti at the Machines in Motion Laboratory. Prior to joining NYU Tandon, I received my bachelor’s and master’s degree in Electrical Engineering from the Technical University of Munich, Germany.
My research interests include machine learning, trajectory optimization, and their applications to robotics. In particular, I develop algorithms allowing robots to robustly apply contact forces to the external world, so that they can move freely and operate safely among us.
publications

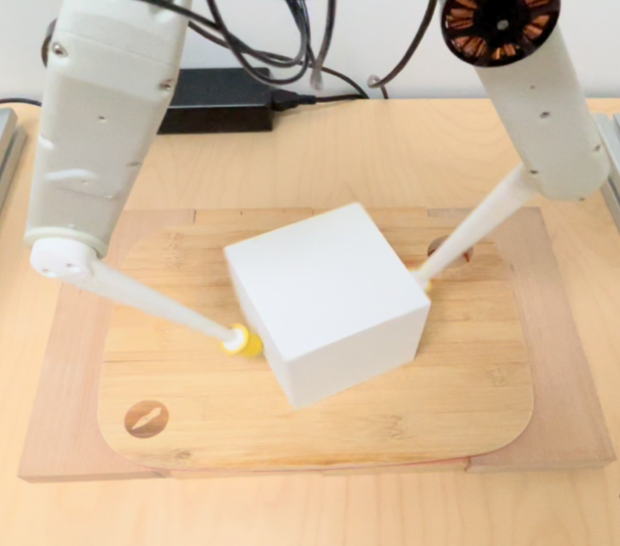
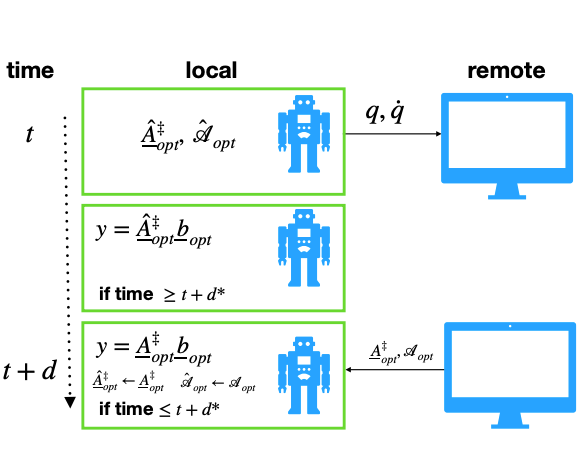 Enabling Remote Whole-Body Control with 5G Edge ComputingIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
Enabling Remote Whole-Body Control with 5G Edge ComputingIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020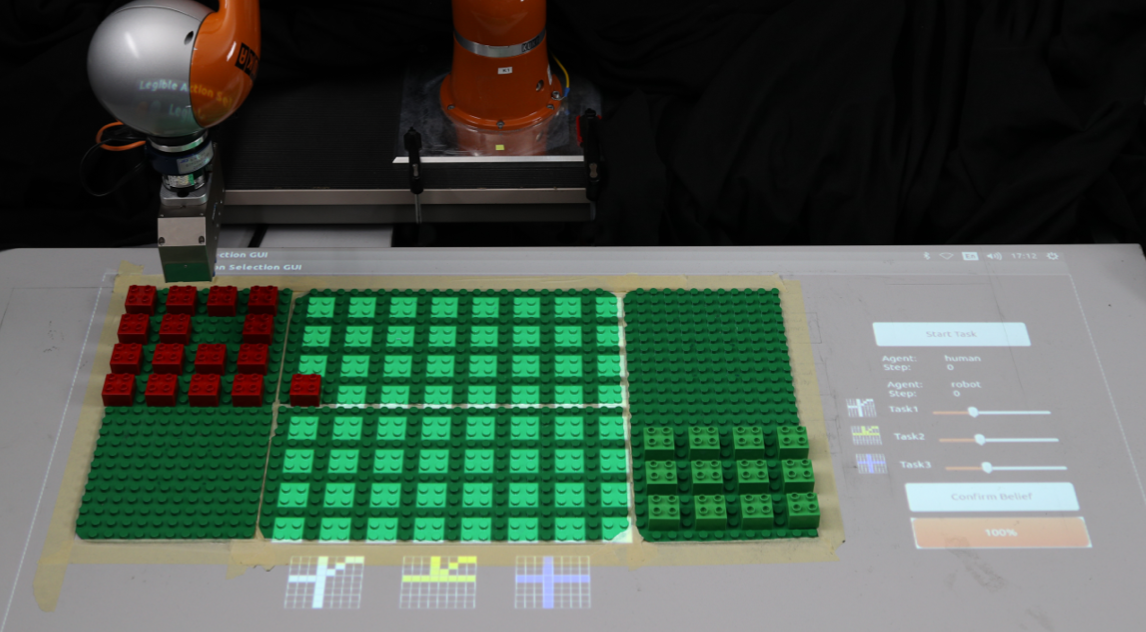 Legible Action Selection in Human-Robot CollaborationIn 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) 2017
Legible Action Selection in Human-Robot CollaborationIn 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) 2017